当有大量的小文件时,基于有中心架构的 HDFS 的 Name Node 会有很大的压力。
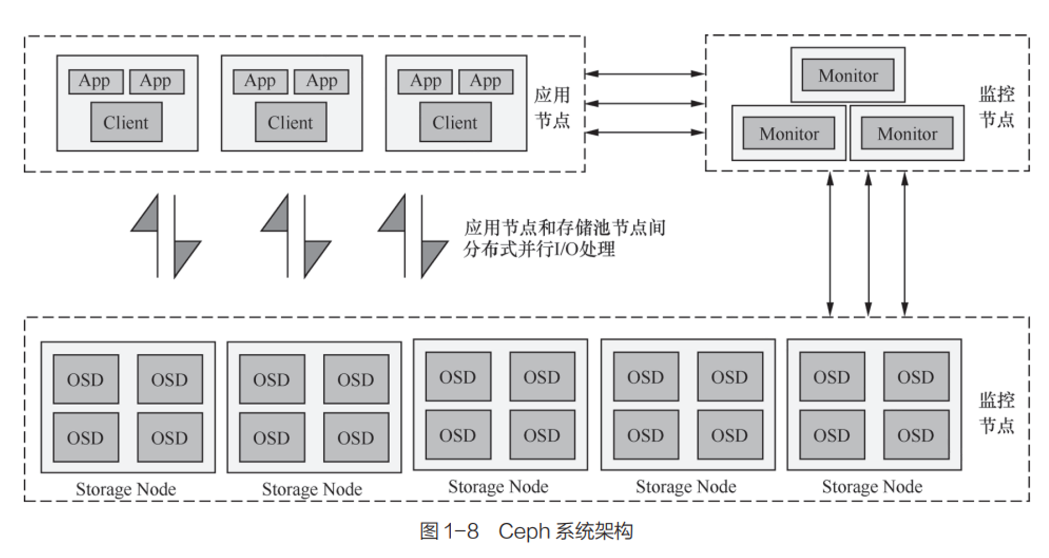
Ceph 是无中心架构的典型,取消了 HDFS 那样的集中式元数据存储。客户端通过一套算法(Crush)在本地计算出写入数据的存储位置,直接与存储节点(数据节点)交互。
仅 Ceph 块设备(RBD)和对象存储(RGW)没有元数据中心节点,文件存储(FS)还是有的,使用 MDS 服务集中存储元数据。
Ceph 中的核心组件包括:
Mon (itor):维护 Monitor Map、OSD Map、PG Map、CRUSH Map 等各种维护存储集群状态的图表。(这些图表保存着其各自的每一次状态变更,称为 Epoch)OSD :Object Storage Device。存储数据、管理磁盘、读写数据。OSD 服务处理数据的复制、恢复(Recovery)、回填(Backfilling)、再均衡(Rebalance)等任务。还会检测其他 OSD 的状态并打包上报给 Mon。 MDS :Metadata Server。负责 CephFS 集群中文件和目录的管理,记录数据的属性,如文件存储位置、大小、存储时间等,同时负责文件查找、文件记录、存储位置记录、访问授权。(有主备机制,主 MDS 故障之后,其他 Standby 的 MDS 会顶上)RADOS :包含 Mon、OSD、MDS 。本质为一套分布式数据存储系统。Ceph存储中所有的数据都以对象形式存在,RADOS 负责保存这些对象。RADOS 层可以确保对象数据始终保持一致性。Ceph 其实是对 RADOS 的二次封装。RBD :提供可靠的分布式、高性能块存储逻辑卷(Volume)给客户端使用。写入 RBD 设备的数据以条带化 的方式存储在 Ceph 集群的多个 OSD 中。
什么是条带化?
基本思想是:以轮转方式将磁盘阵列的块分布在磁盘上。
RGW :RADOS Gateway。提供对象存储服务。支持 Amazon S3 的 API 调用方式。CephFS :提供与 POSIX 兼容的文件系统。
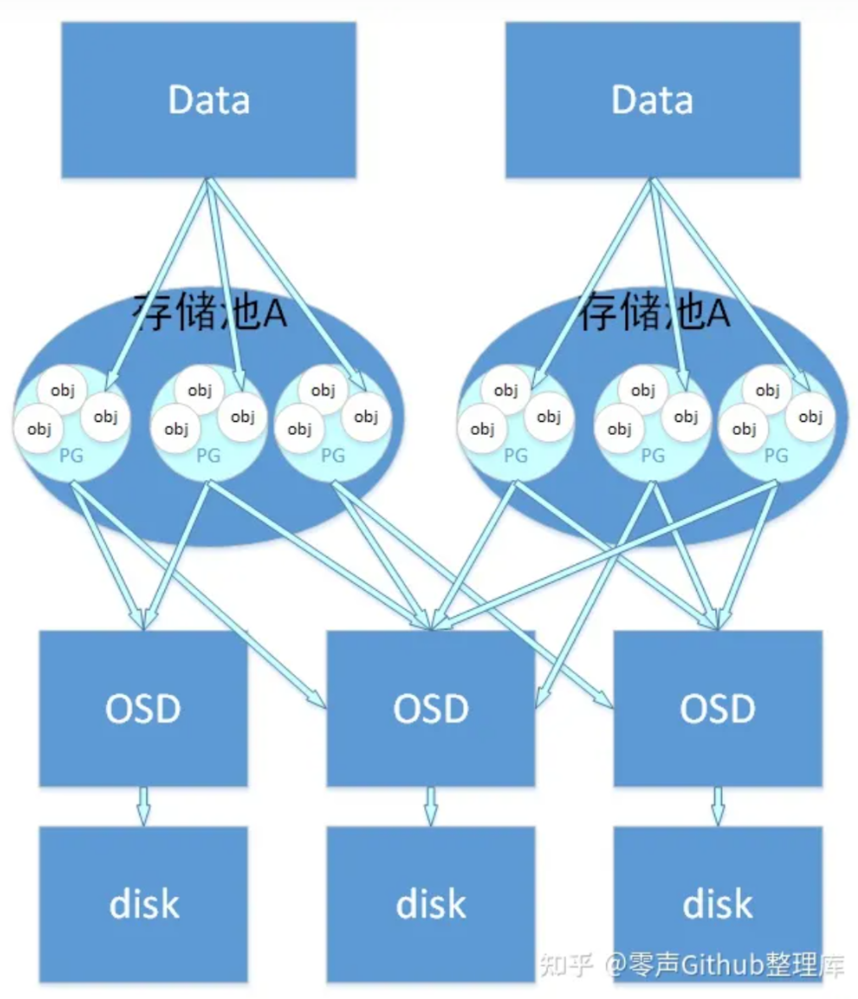
假设要存一个 1GiB 的文件。
Ceph 客户端持有一个 Cluster Map(初始化时就会向 Moniter 服务获取最新的 Map,然后采用反向订阅机制,仅在 Cluster Map 变化时,Mon 会主动推送 )。
只要根据这个 Map 和文件的一些信息(如文件名和文件大小)就能得到这个文件的每个 Object 所在的 OSD 的 ID,然后直接与其通信。
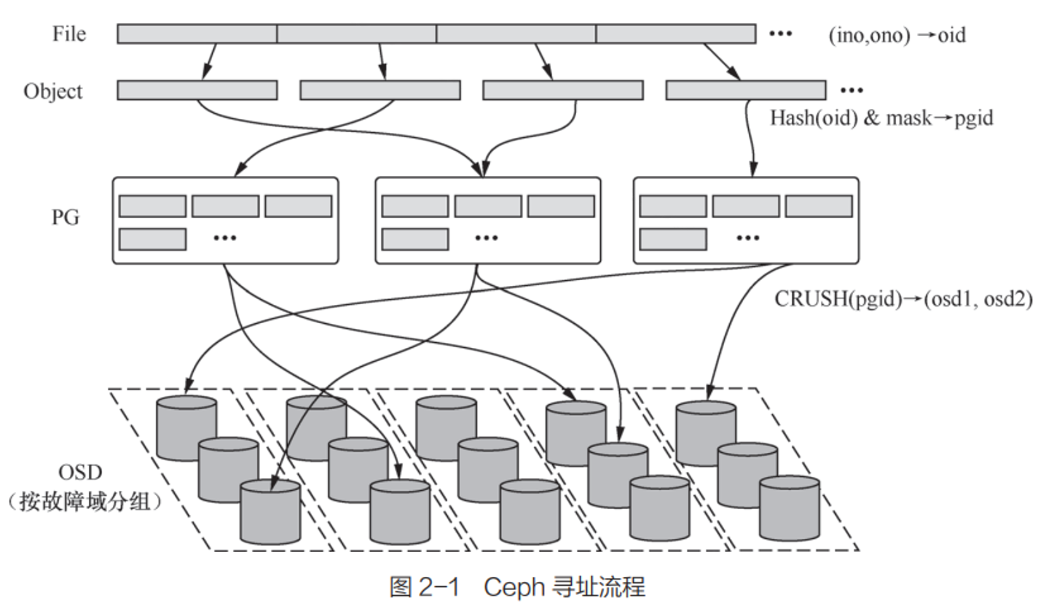
一个文件对应一个唯一的 ino 。
这个文件首先在 Ceph 中被切割成多个 Object,用 ino+ono 标识。
然后通过对这个标识 hash 来分到不同的 PG 中,得到 PGID(每个 Object 分配一个 PG。一般来说,这样计算之后得到的 PGID 在大规模数据量看来会是均匀分布的)。
PG是一个为方便管理 OSD(对象存储设备) 而设置的一个抽象概念,一个PG中有多个 OSD,一个 OSD 也会承载多个PG。
得到 PGID 后,用 CRUSH 算法带入 PGID 得到多个 OSD 存入。
由 PG 映射到数据存储的实际单元 OSD 中,该映射是由 CRUSH 算法来确定的。
使用 CRUSH 算法相对于使用 Hash 算法的好处:
CRUSH 具有可配置特性,可根据配置参数 决定OSD的物理位置映射策略;
CRUSH具有特殊的“稳定性”,当系统中加入新的 OSD 导致系统规模增大时,大部分 PG 与 OSD 之间的映射关系不会发生改变,只是少部分 PG 的映射关系会发生变化并引发数据迁移(Straw 和 Straw2)
PG 是用来存放 Object 的,PGP 相当于是 PG 存放 OSD 的一种排列组合。一般来说应该将PG和PGP的数量设置为相等。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 > ceph osd pool create testpool 6 6 1.1 75 [3,6,0] 1.0 83 [7,0,6] 1.3 144 [4,1,2] 1.2 146 [7,4,1] 1.5 86 [4,6,3] 1.4 80 [3,0,4] > ceph osd pool set testpool pg_num 12 1.1 37 [3,6,0] 1.9 38 [3,6,0] 1.0 41 [7,0,6] 1.8 42 [7,0,6] 1.3 48 [4,1,2] 1.b 48 [4,1,2] 1.7 48 [4,1,2] 1.2 48 [7,4,1] 1.6 49 [7,4,1] 1.a 49 [7,4,1] 1.5 86 [4,6,3] 1.4 80 [3,0,4] > ceph osd pool set testpool pgp_num 12 1.a 49 [1,2,6] 1.b 48 [1,6,2] 1.1 37 [3,6,0] 1.0 41 [7,0,6] 1.3 48 [4,1,2] 1.2 48 [7,4,1] 1.5 86 [4,6,3] 1.4 80 [3,0,4] 1.7 48 [1,6,0] 1.6 49 [3,6,7] 1.9 38 [1,4,2] 1.8 42 [1,2,3]
可以看到:
PG 是指定一个 Pool 中存储对象的”目录”有多少个, 而 PGP 指定 OSD 的排列组合有多少组
⚠ PG 的增加会引起 PG 内维护对象的分裂, 不会触发 Rebalance
⚠ PGP 的增加可能会改变一个 PG 所映射的 OSD 的组合,会导致 Rebalance
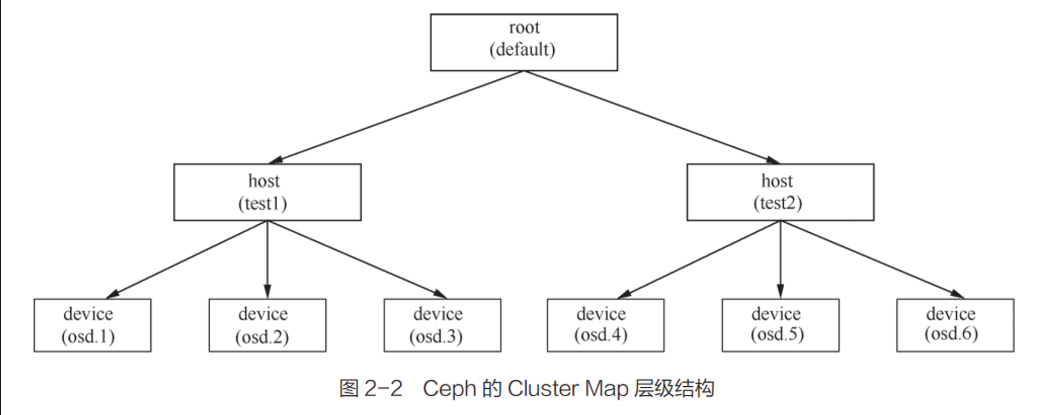
CRUSH有两个关键参数:Cluster Map 和 Placement Rules。
反映整个 Ceph 存储系统层级(共 11 个层级)的物理拓扑结构 。
包含OSD守护进程的层级信息。
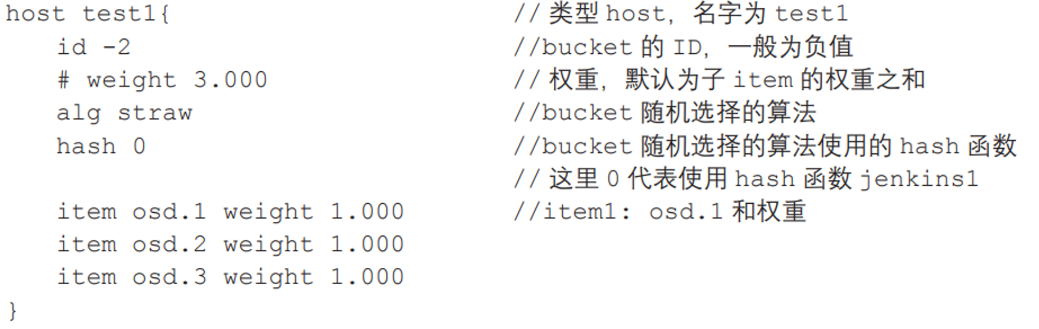
由 Device(OSD)和 Bucket(存 OSD 的容器,可以是很多东西,如 Host,Rack 机架)这两个基本元素形成一整个结构体系。
Device 有权重概念。越高的权重在选 Device 时就会更多地选到这个 Device 上。Bucket 也有权重概念,其最终权重是它的权重和它所包含的 Device 权重的总和。
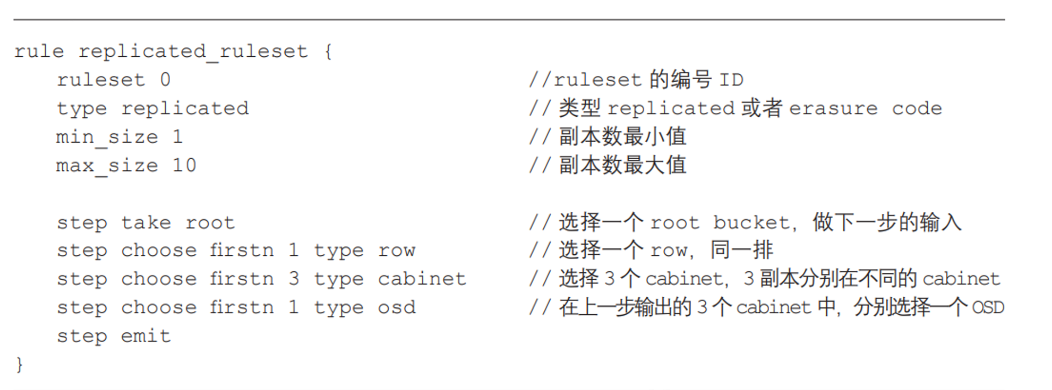
决定了一个 PG 如何选择 OSD。通过自定义 Placement Rules,用户可以设置副本在集群中的分布
定义类似:
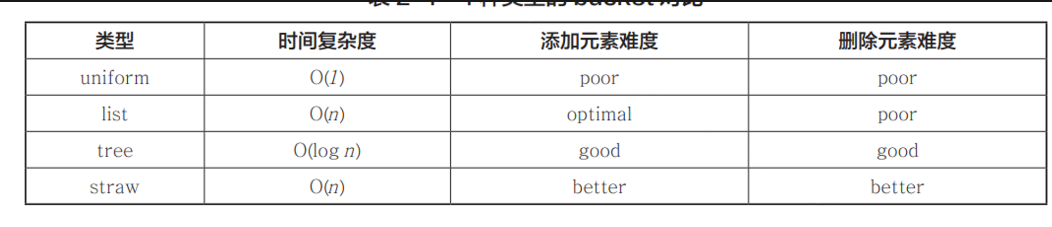
四种 CRUSH 算法:
Straw 算法过程:
1 2 3 4 5 6 7 8 9 max_x = -1 max_item = -1 for each item: x = random value from 0..65535 x *= scaling factor if x > max_x: max_x = x max_item = item return item
(1)给出一个 PG_ID,作为 CRUSH_HASH 方法的输入;
Straw2 算法过程:
1 2 3 4 5 6 7 8 9 max_x = -1 max_item = -1 for each item: x = random value from 0..65535 x = ln (x / 65536) / weight if x > max_x: max_x = x max_item = item return item
Straw 算法里面添加节点或者减少节点,其他服务器上的 OSD 之间会有PG 的流动(即数据的迁移);Straw2 算法里面添加节点或者减少节点,只会有 PG 从变化的节点移出或者从其他点移入,其他不相干节点不会触发数据的迁移。
Ceph 的 Luminous 版本开始默认支持 Straw2 算法。
下面列出常见的 PG 状态。
等待 PG 包含的冗余组中所有对象达到一致性。I/O 阻塞。
等待其他副本(OSD 守护进程)上线。I/O 阻塞。
PG 副本数 < 3
Recovery 指对应副本能够通过日志(PGLog1)进行恢复,即只需要修复该副本上与权威日志不同步的那部分对象,即可完成存储系统内数据的整体恢复。
Recovery 有两种恢复方式:Pull(Primary 自身选择合适的副本拉取降级对象的权威日志),Push(主动)Primary 节点会先 Pull, 然后再 Push。
客户端读请求,待访问的对象在一个或者多个副本上处于降级状态,对应的读请求可以直接在 Primary 上完成,对象仅仅在副本上降级,无任何影响。如果 Primary 上也处于降级状态,需要等 Primary 完成修复,才能继续。
客户端写请求,待访问的对象在一个或者多个副本上处于降级状态,必须修复该对象上所有的降级副本之后才能继续处理写请求。最坏情况,需要先修复 Primary,再由 Primary 修复其他降级副本。
通过 librbd、KRBD 等访问。一般选用前者。后者是 Kernel RBD,Linux 内部支持的,运行在操作系统内核态,需要部署在客户端节点的操作系统内核中。
librbd 按照使用方式又可以分为 QEMU+librbd、SPDK+librbd 和 NBD+librbd。
快照只读,克隆可读写,Ceph RBD 设备的快照和克隆操作存在相关性,即克隆操作一定要基于某一已创建的快照进行。
Ceph RBD 的快照和克隆均采用 COW。这样也会有这个问题:当一个 RBD 上有较多层级的克隆卷时,对克隆卷进行读写时,可能会涉及较多层级的递归查询操作,会对克隆卷的性能产生不小的影响。(可解除克隆卷与原卷的依赖关系)
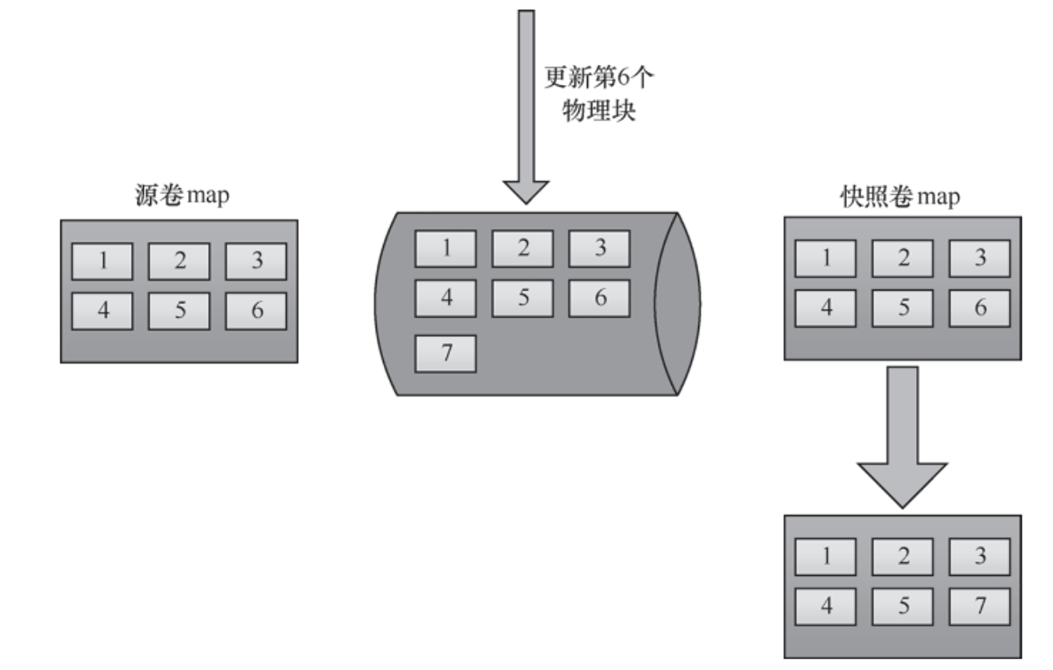
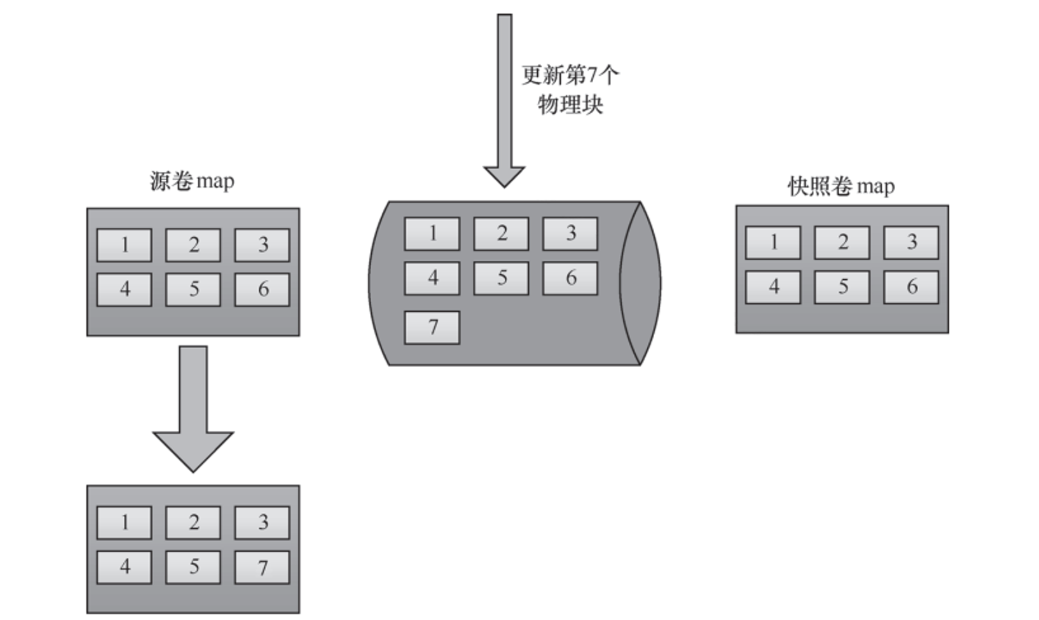
下面的图中,场景是新数据写入到已经有快照的源卷的第 6 块上。
这种方式很好地节省了空间,但这也会造成写放大,因此创建多个快照之后,对 I/O 性能的劣化效果会越来越明显。因为在为快照向新的物理空间复制出一份数据之后,还要为所有已创建的快照修改数据块的地址指针。
附 ROW 的机理图:
显然,ROW 不会造成写放大,因为新数据直接写到新块(7)上(假设新数据 I/O 落在原卷第 6 个块上)。但是这样源卷的存储物理空间发生了变化(原来的 6 现在指向 7)。
会劣化源卷的顺序读写。
提供读缓存、写合并
存在内存中,有一定的可自定义的策略定时 Write Back。
支持 RWL,能大幅度提高IOPS,并且容灾性能++(需要特定硬件)
提供针对不同用户或不同数据流采用不同优先级的 I/O 读写能力服务策略。
Ceph RBD 设备突发能力的实现基于令牌桶。
3个虚拟机IP:
1 10.2 .217 .231 (master),10.2 .217 .214 ,10.2 .217 .204
使用cephadm工具进行搭建。
修改主机名
1 hostnamectl set-hostname cephtest1
修改/etc/hosts文件(3个都要改)
1 2 3 4 5 ... 10.2.217.204 cephtest1 10.2.217.231 cephtest2 10.2.217.214 cephtest3
(可选)如果在你的公司内网部署,需配置yum repo源
1 2 3 4 5 vim /etc/yum.repos.d/8ASU7_Red.repo yum makecache
关闭防火墙、开启时间同步
1 2 3 4 5 systemctl disable --now firewalld setenforce 0 sed -i 's/^SELINUX=.*/SELINUX=disabled/' /etc/selinux/config yum install -y chrony systemctl enable --now chronyd
安装lvm2、python3、docker-ce
1 2 3 4 5 yum install -y lvm2 yum install -y python3 ln -s /usr/bin/python3 /usr/bin/pythonyum install -y docker-ce
cephadm安装(从这一步开始,只需要其中一台机器作为master来执行)
1 2 3 curl https://raw.githubusercontent.com/ceph/ceph/v15.2.1/src/cephadm/cephadm -o cephadm chmod 777 cephadm && ./cephadm add-repo --release octopus./cephadm install
cephadm加载
1 2 mkdir -p /etc/cephcephadm bootstrap --mon-ip 10.2.217.231
稍等,就会出现如下信息:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 Ceph Dashboard is now available at: URL: https://cephtest1:8443/ User: admin Password: f38lpz1yzj You can access the Ceph CLI with: sudo /usr/sbin/cephadm shell --fsid e8aad788-418a-11ee-b97d-fa163e71b85a -c /etc/ceph/ceph.conf -k /etc/ceph/ceph.client.admin.keyring Please consider enabling telemetry to help improve Ceph: ceph telemetry on For more information see: https://docs.ceph.com/docs/master/mgr/telemetry/
安装ceph-common
1 cephadm install ceph-common
加入其他机器到集群
1 2 3 4 5 6 7 8 9 10 11 ssh-copy-id -f -i /etc/ceph/ceph.pub root@cephtest2 ceph orch host add cephtest2 10.2.217.214 [@cephtest1 ~]# ceph orch host ls HOST ADDR LABELS STATUS cephtest1 cephtest1 cephtest2 10.2.217.231 cephtest3 10.2.217.214
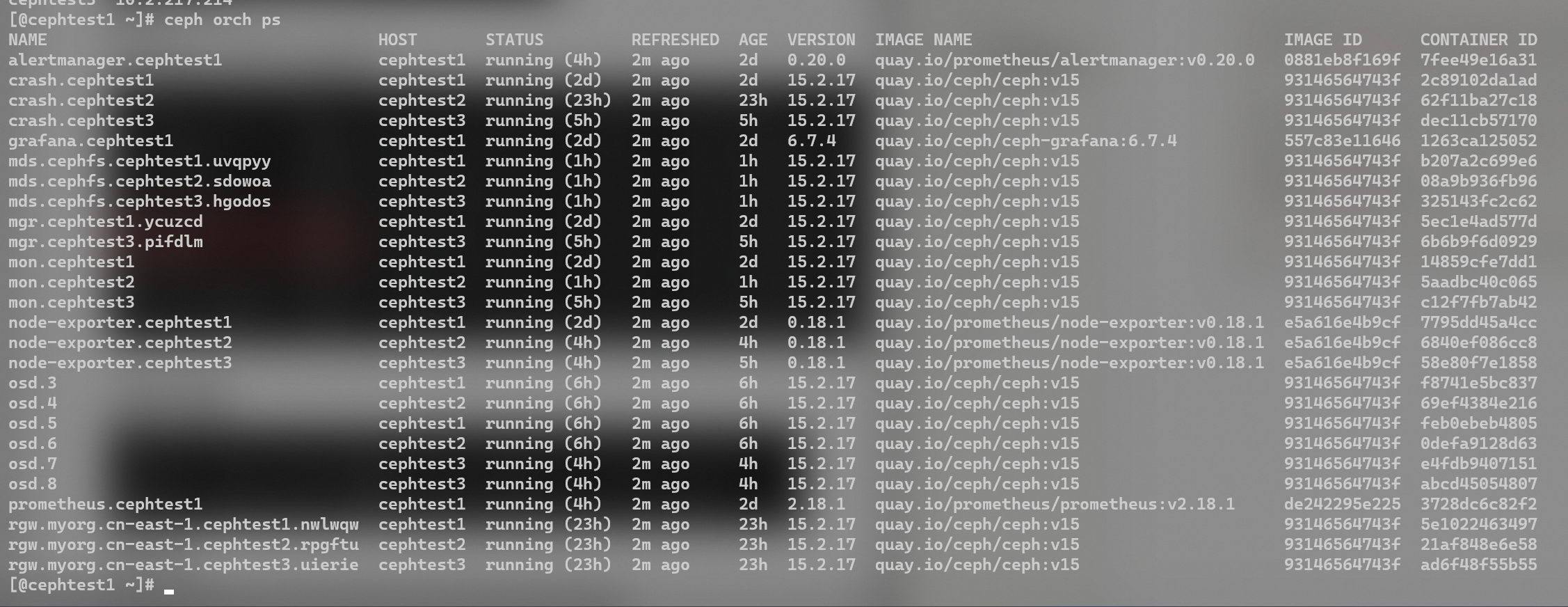
输入ceph orch ps可以看到运行着的容器。如果有error,说明部署操作有问题。
NOTE:ceph所有服务都是在 docker 内运行的,有monitor、crash、osd、rgw等服务(所以很吃内存)。结合近期踩过的坑,可以了解到启动的脚本其实是放在/var/lib/ceph/xxxx[集群id]/xxx[服务名称]/unit.run下的。master 节点先通过ssh装载ceph相关服务,然后远程调用这个脚本来在这个节点上启动docker。
[@cephtest3 ~]# cd /var/lib/ceph/e8aad788-418a-11ee-b97d-fa163e71b85a/mon.cephtest3/
**NOTE2:如果见到哪个error了,直接在master上面通过诸如**ceph orch daemon rm mon.cephtest2 —force的指令删除该daemon,然后再用类似的指令apply:ceph orch apply mon --placement="cephtest1, cephtest2, cephtest3” (这里以重装monitor为例)
部署OSD
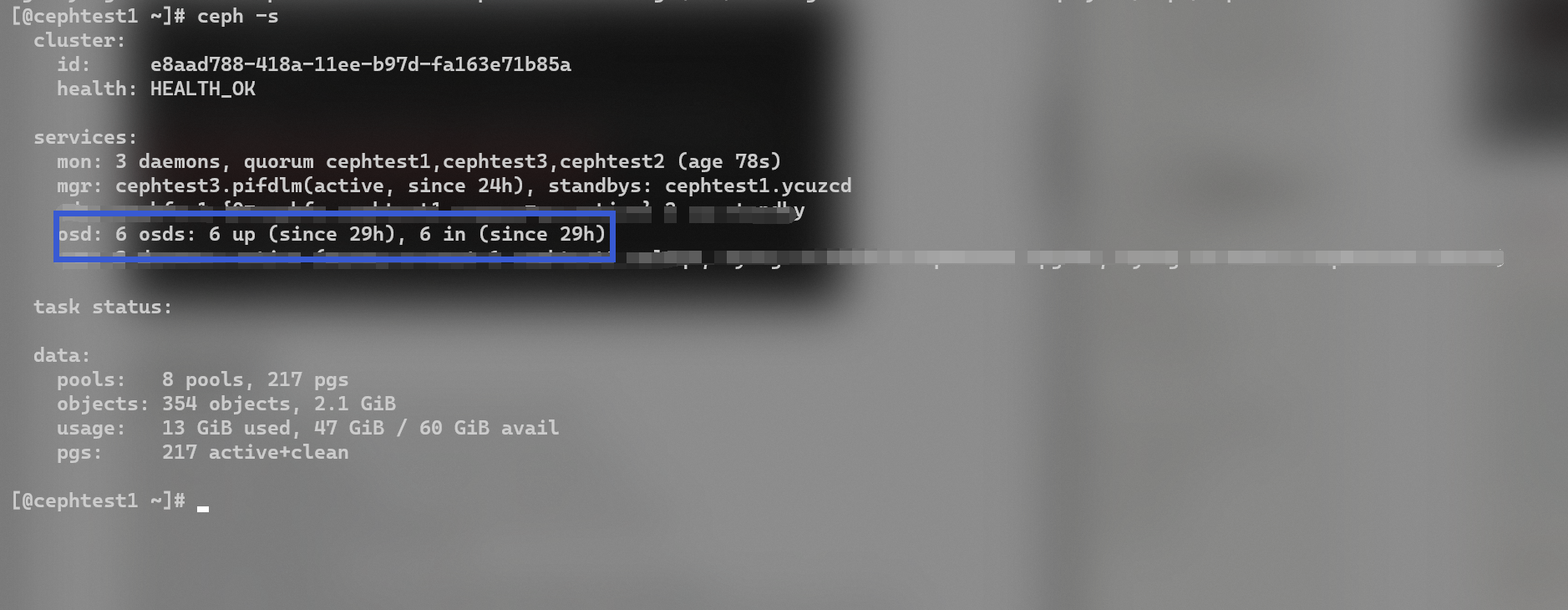
1 2 3 4 5 6 7 8 9 10 11 12 ceph orch device ls ceph orch apply osd --all-available-devices ceph -s
如果发现所有设备均 avaliable no,可以使用
1 ceph orch device ls --wide --refresh
来查看原因。
osd: 6 osds: 6 up (since 29h), 6 in (since 29h)
部署MDS
1 2 3 4 5 ceph osd pool create cephfs_data 64 64 ceph osd pool create cephfs_metadata 64 64 ceph fs new cephfs cephfs_metadata cephfs_data ceph fs ls ceph orch apply mds cephfs --placement="cephtest1 cephtest2 cephtest3"
静待3分钟左右,然后输入docker ps | grep mds。
这一步完成之后,我们就已经可以正常使用Ceph了。在用户侧,可以直接连接RADOS上传文件。以下是上传文件的代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 import radosimport timeimport uuidcluster = rados.Rados(conffile='/etc/ceph/ceph.conf' ) cluster.connect() ioctx = cluster.open_ioctx('cephfs_data' ) def write_file (file_name ): start = time.time() fn = file_name + "." + str (uuid.uuid4()) print ("Start writing " + fn) with open (file_name, 'rb' ) as f: data = f.read() ioctx.write_full(fn, data) end = time.time() print (fn + " is written. Time: " + str (end - start) + "s" ) print ("Speed: " + str (len (data) / (end - start) / 1024 / 1024 ) + "MB/s" ) import threadingthreads = [] for i in range (1 , 11 ): t = threading.Thread(target=write_file, args=("OS.pdf" ,)) threads.append(t) t.start()
可以看到,osd存储量一直在上升,说明上传有效果。也可以通过指令查看一个pool存储的文件。
不过直连RADOS是不太好的,测试发现,上传完毕之后并不会进行4MiB为单位的文件分片 。查询相关文档之后知道这样直连RADOS,分片阈值时128MiB。
我们可以挂rbd(块存储)或者用s3(对象存储,需要部署对象网关RGWS并创建账号)来更好地使用ceph。
部署RGWS网关
如果你不需要使用S3对象存储,那么这一步可以先跳过。
1 2 3 4 radosgw-admin realm create --rgw-realm=myorg --default radosgw-admin zonegroup create --rgw-zonegroup=default --master --default radosgw-admin zone create --rgw-zonegroup=default --rgw-zone=cn-east-1 --master --default ceph orch apply rgw myorg cn-east-1 --placement="cephtest1 cephtest2 cephtest3"
静待3分钟左右,然后输入docker ps | grep rgw。
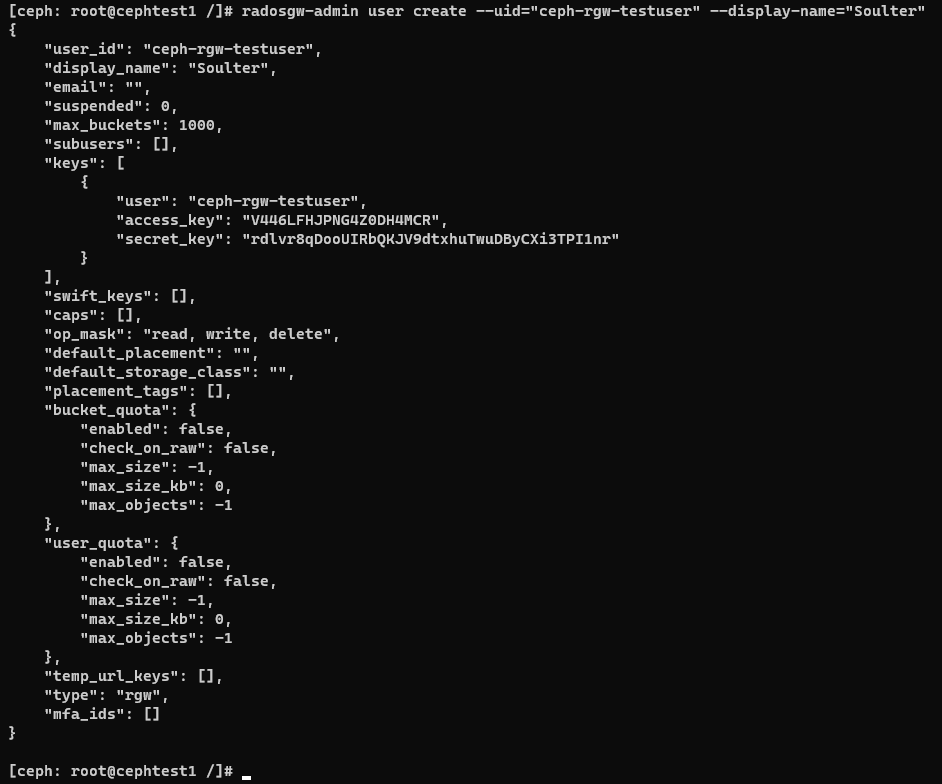
使用cephadm shell进入ceph,然后添加用户:
1 2 radosgw-admin user create --uid="ceph-rgw-testuser" --display-name="Soulter"
可以看到,我们刚刚在对象网关 创建了一个新的用户。其实access_key和secret_key就已经类似于那些云厂商提供的key了。
下面使用一下对象存储吧!
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 import botoimport boto.s3.connectionaccess_key = 'V446LFHJPNG4Z0DH4MCR' secret_key = 'rdlvr8qDooUIRbQKJV9dtxhuTwuDByCXi3TPI1nr' conn = boto.connect_s3( aws_access_key_id = access_key, aws_secret_access_key = secret_key, host = 'cephtest1' , port = 80 , is_secure=False , calling_format = boto.s3.connection.OrdinaryCallingFormat(), ) bucket = conn.create_bucket('ceph-s3-bucket' ) for bucket in conn.get_all_buckets(): print ("{name}" .format (name = bucket.name))
(到这里我们就可以开发出七牛云等云厂商的对象存储服务了)
部署rbd
1 2 3 4 5 6 7 8 9 10 11 12 13 14 ceph osd pool create rbd 32 32 ceph osd pool ls ceph osd pool application enable rbd rbd rbd pool init -p rbd rbd create rbd-data-img1 --size 1G --pool rbd --image-format 2 --image-feature layering rbd ls --pool rbd -l
客户端使用rbd:
1 2 3 4 5 yum install epel-release yum install https://mirrors.aliyun.com/ceph/rpm-octopus/el7/noarch/ceph-release-1 -1. el7.noarch.rpm -y yum install ceph-common
NOTE:客户端的/etc/ceph/文件夹下的ceph.conf 和 ceph.client.admin.keyring需要和集群的相同。
1 rbd -p rbd map rbd-data-img1
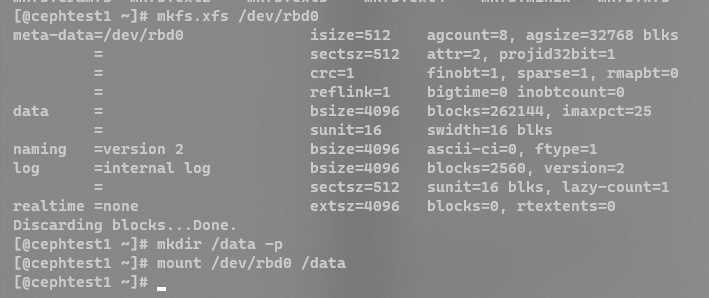
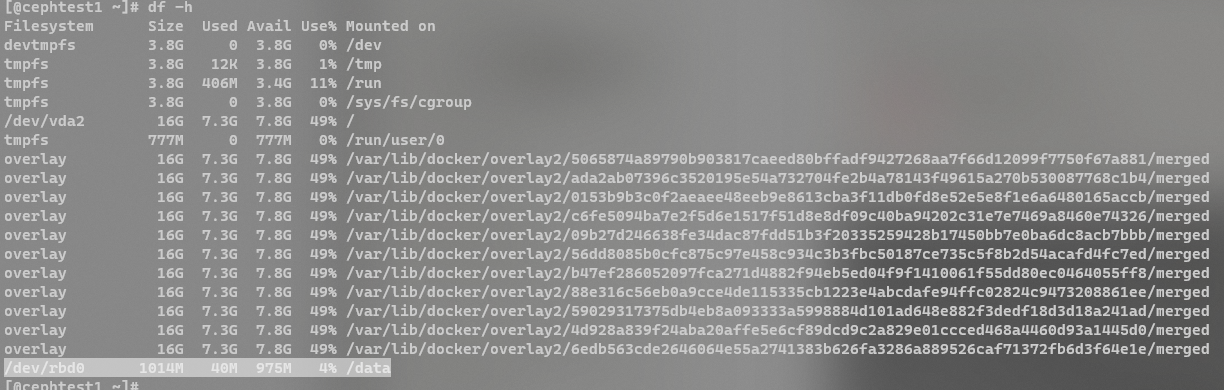
然后我们就可以用lsblk指令看到刚刚映射的盘了。
1 2 3 4 mkfs.xfs /dev/rbd0 mkdir /data -pmount /dev/rbd0 /data
(到这里我们就可以开发出阿里网盘的挂载盘的功能了)
本脚本主要使用osdmaptool这一个工具来解决pg分布不均衡的问题,从外层看,解决的是磁盘占用率不均衡的问题。
osdmaptool 工具通过一些参数来输出需要优化的信息。
1 2 3 4 5 6 7 8 9 命令 osdmaptool {osdmap_filename} --upmap out.txt [–upmap-pool ] [–upmap-max ] [–upmap-deviation ] 其中 upmap-pool :指定需要优化均衡的存储池名 upmap-max : 指定一次优化的数据条目,默认100 ,可根据环境业务情况调整该值,一次调整的条目越多,数据迁移会越多,可能对环境业务造成影响。 max -deviation:最大偏差值,默认为0.01 (即1 %)。如果OSD利用率与平均值之间的差异小于此值,则将被视为完美。
下面的代码主要实现了定时启动、决定何时调用osdmaptool。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 import osimport timefrom subprocess import Popen, TimeoutExpired, PIPEimport datetimeUPMAP_MAX = 100 UPMAP_DEVIATION = 1 POOL = "cephfs_data" ROUND_SECONDS = 1000 FG_COLORS = { "black" : "30" , "red" : "31" , "green" : "32" , "yellow" : "33" , "blue" : "34" , "purple" : "35" , "cyan" : "36" , "white" : "37" , "default" : "39" , } BG_COLORS = { "black" : "40" , "red" : "41" , "green" : "42" , "yellow" : "43" , "blue" : "44" , "purple" : "45" , "cyan" : "46" , "white" : "47" , "default" : "49" , } LEVEL_INFO = "INFO" LEVEL_WARNING = "WARNING" LEVEL_ERROR = "ERROR" LEVEL_CRITICAL = "CRITICAL" level_colors = { "INFO" : "green" , "WARNING" : "yellow" , "ERROR" : "red" , "CRITICAL" : "purple" , } def get_osd_df (pool ): osd_df = os.popen("cephadm shell ceph osd df" ).read() osd_df = osd_df.split("\n" )[1 :] osd_df = [line.split(" " ) for line in osd_df] osd_df = [[word for word in line if word != "" ] for line in osd_df] osd_df = osd_df[:-3 ] ave_used = 0 for osd in osd_df: ave_used += float (osd[16 ]) ave_used /= len (osd_df) log(f"pool {pool} OSD Average used: " + str (ave_used), level=LEVEL_INFO) osd_to_upmap = [] for osd in osd_df: if osd[19 ] != "UP" : continue if abs (float (osd[16 ]) - ave_used) > UPMAP_DEVIATION: osd_to_upmap.append(osd[0 ]) if len (osd_to_upmap) > 0 : log(f"Found unbalanced OSD in pool {pool} : " + str (osd_to_upmap), level=LEVEL_INFO) t = os.popen(f"cephadm shell -- bash -c 'ceph osd getmap -o osd.map; osdmaptool osd.map --upmap t.out --upmap-pool {pool} --upmap-max {UPMAP_MAX} --upmap-deviation {UPMAP_DEVIATION} ; cat t.out'" ).read() upmap_cmds = [] l = t.split("\n" ) for line in l: if line.startswith("ceph osd pg-upmap-item" ): upmap_cmds.append(line) log(f"Upmap commands: " + str (upmap_cmds), level=LEVEL_INFO) f_name = f"osd_upmap_{time.time()} " if len (upmap_cmds) > 0 : with open (f_name, "w" ) as f: f.write("\n" .join(upmap_cmds)) t = os.popen(f"chmod +x {f_name} && ./{f_name} " ).read() log(f"Upmap done. Result: " + str (t), level=LEVEL_INFO) else : log(f"No upmap commands generated, skip." , level=LEVEL_INFO) def log ( msg: str , level: str = "INFO" , tag: str = "System" , fg: str = None , bg: str = None , max_len: int = 10000 ): if len (msg) > max_len: msg = msg[:max_len] + "..." now = datetime.datetime.now().strftime("%m-%d %H:%M:%S" ) pre = f"[{now} ] [{level} ] [{tag} ]: {msg} " if level == "INFO" : if fg is None : fg = FG_COLORS["green" ] if bg is None : bg = BG_COLORS["default" ] elif level == "WARNING" : if fg is None : fg = FG_COLORS["yellow" ] if bg is None : bg = BG_COLORS["default" ] elif level == "ERROR" : if fg is None : fg = FG_COLORS["red" ] if bg is None : bg = BG_COLORS["default" ] elif level == "CRITICAL" : if fg is None : fg = FG_COLORS["purple" ] if bg is None : bg = BG_COLORS["default" ] print (f"\033[{fg} ;{bg} m{pre} \033[0m" ) if __name__ == "__main__" : while True : log("Balance check start" , level=LEVEL_INFO, bg=BG_COLORS["yellow" ]) get_osd_df(pool=POOL) log("Balance check end" , level=LEVEL_INFO, bg=BG_COLORS["yellow" ]) time.sleep(ROUND_SECONDS)
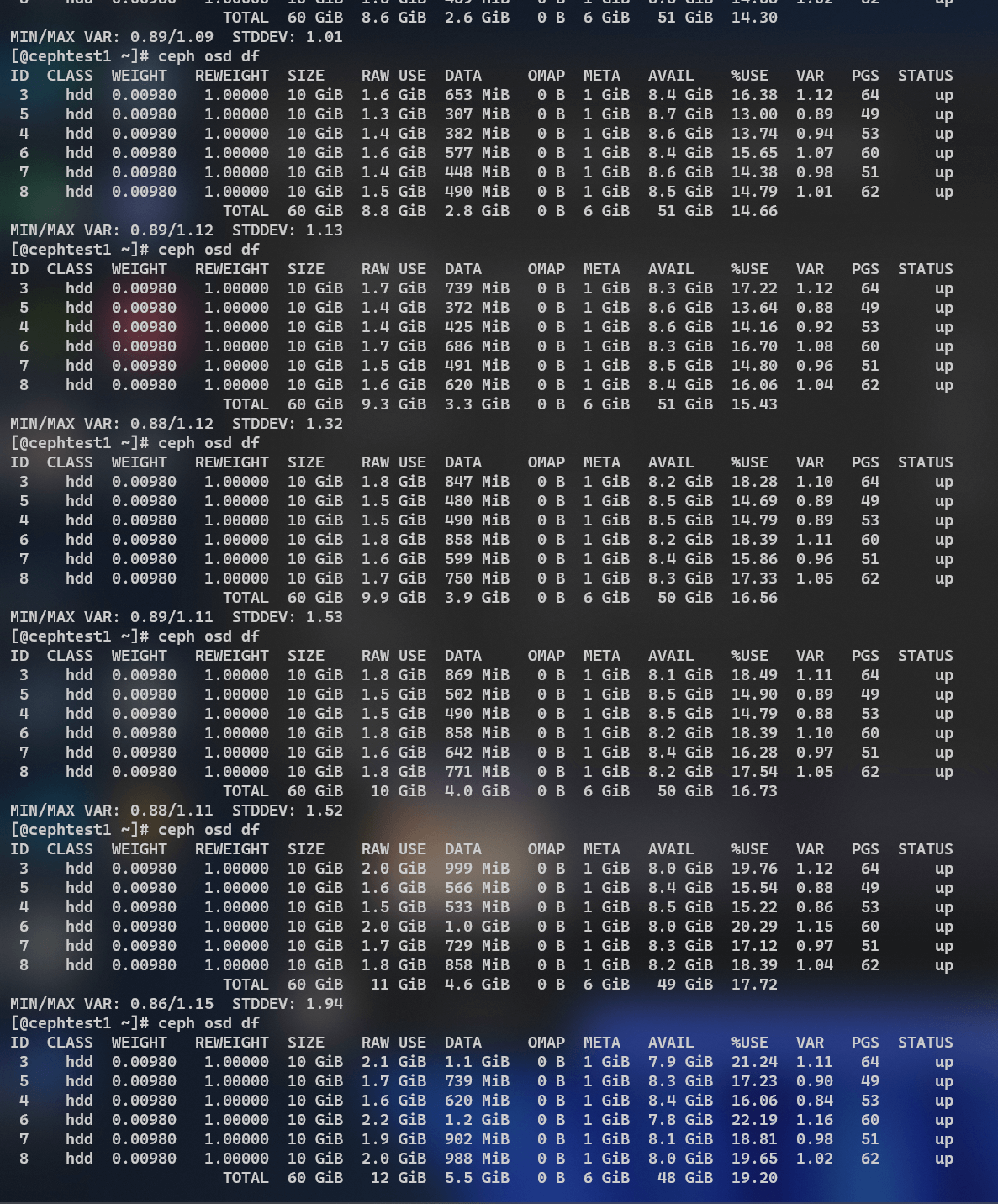
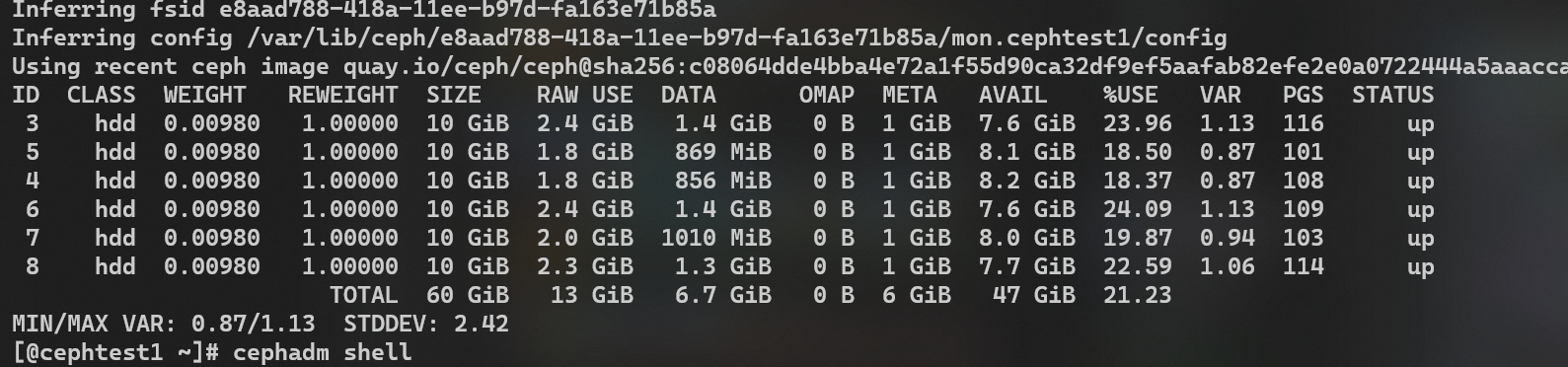
效果(由于测试集群负载不大,因此效果可能不太显著,但是是倾向于有效果的。):
原来:
优化后:
Ceph Luminous手动解决pg分布不均衡问题 - 简书 (jianshu.com)
ceph 数据均衡(balance)_ceph balancer_菜猿猿的博客-CSDN博客
kernel_awsome_feature/Ceph/Ceph分层存储优化策略研究与实现.pdf at main · 0voice/kernel_awsome_feature (github.com) 理解 QEMU/KVM 和 Ceph(1):QEMU-KVM 和 Ceph RBD 的 缓存机制总结 - SammyLiu - 博客园 (cnblogs.com) Ceph 发展十年的教训:文件系统不适合作为分布式存储后端_软件工程_Murat Demirbas_InfoQ精选文章 cephAdm部署ceph集群 - 掘金 (juejin.cn)
https://access.redhat.com/documentation/zh-cn/red_hat_ceph_storage/6/html/developer_guide/the-ceph-restful-api-specifications
Ceph的Python接口 - salami_china - 博客园 (cnblogs.com)
ceph 对象存储查询对象数据 - 殇™ - 博客园 (cnblogs.com)
https://www.cnblogs.com/sunbines/p/15535895.html
Ceph笔记 · 大专栏 (dazhuanlan.com)